Cellular
LTE / 5G NRTiming advance and RSRP measurements from cell towers provide coarse but reliable distance estimates across urban and rural terrain.
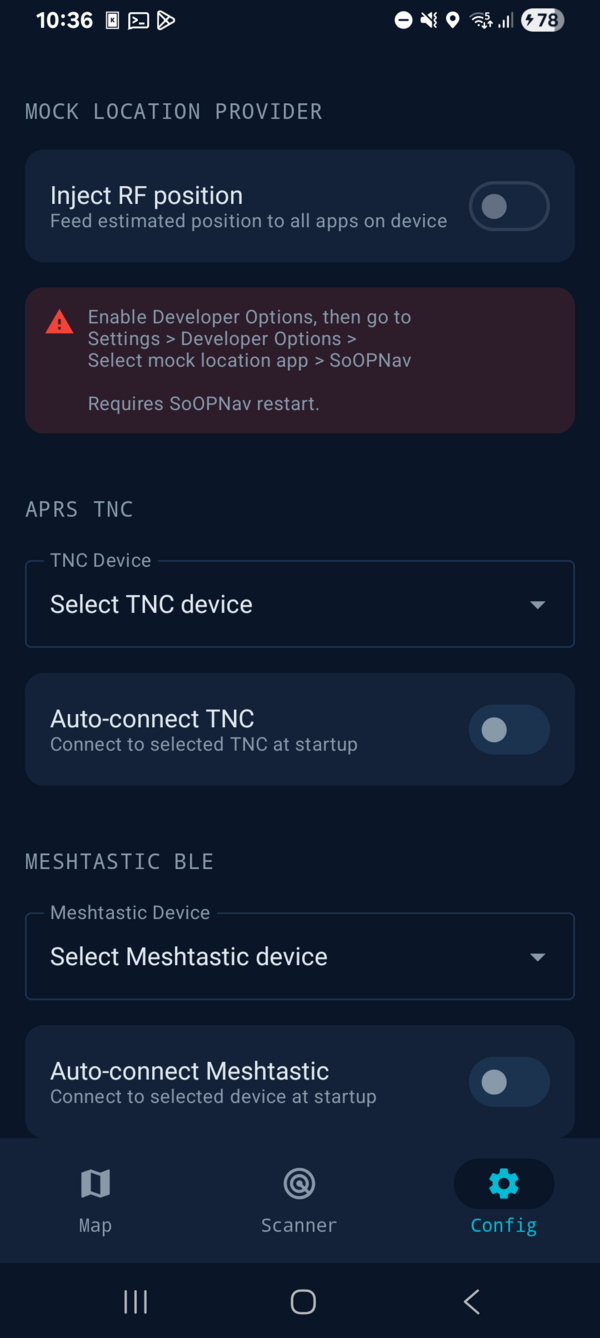
GPS-denied positioning using non-navigation RF signals.
When satellites go dark, the spectrum stays lit.
Timing advance and RSRP measurements from cell towers provide coarse but reliable distance estimates across urban and rural terrain.
RSSI fingerprinting against known access point positions. Dense urban environments yield sub-15m positioning with sufficient AP coverage.
Short-range beacon triangulation for indoor and near-field positioning. TX power normalization enables consistent distance estimation.
Mesh radio nodes with known GPS positions relay coordinates. SNR and hop count provide distance bounds for position estimation.
Automatic Packet Reporting System stations broadcast GPS-tagged beacons over VHF. Received signal strength from digipeaters with known positions provides long-range distance estimates.
Aircraft transponder broadcasts received via a dedicated SDR tab. Known aircraft positions from ADS-B squitters provide coarse positioning reference points at extended range.
Commercial FM broadcasts carry RDS metadata identifying each station. Known transmitter coordinates combined with received signal strength provide regional positioning bounds across wide rural coverage. CA / UK / US transmitter databases supported currently.
LEO satellite messaging constellation. Public ephemeris from TLE catalogs plus Doppler shift on the downlink carrier yields ranging at orbital scale — useful when terrestrial infrastructure is unavailable. Sub-kilometer precision achievable across multiple passes.
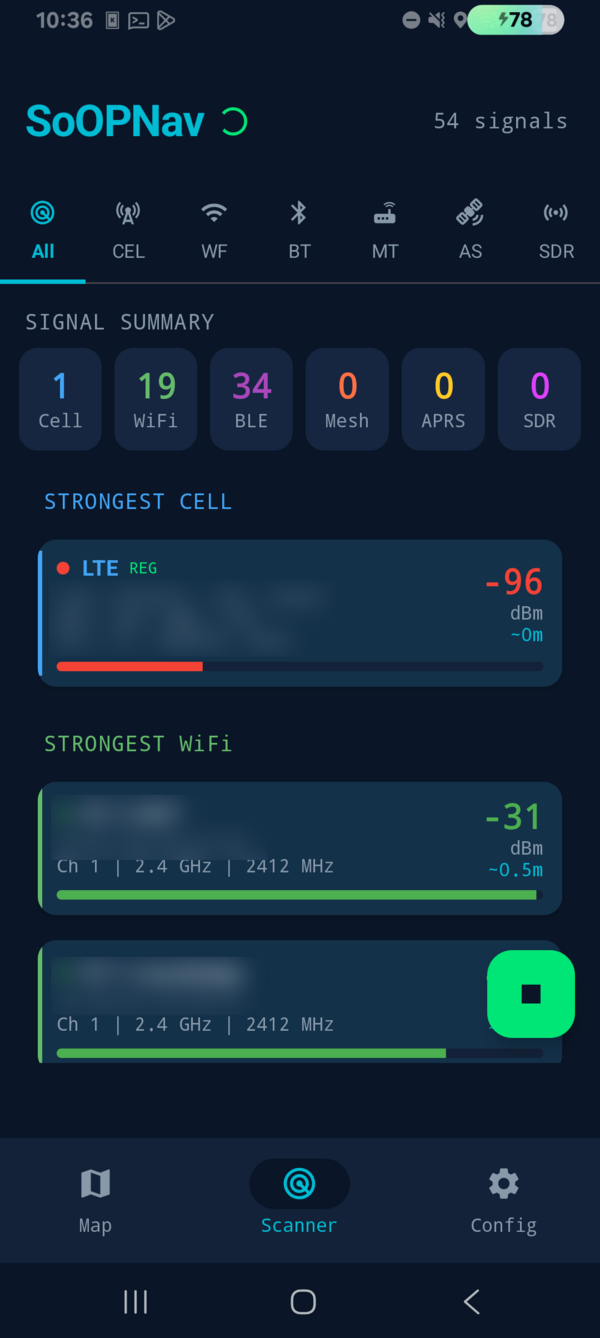
Live RF acquisition across all bands with per-type signal counts and strongest-source telemetry.
Sweep all available RF bands. Collect RSSI, timing, and metadata from every signal source in range.
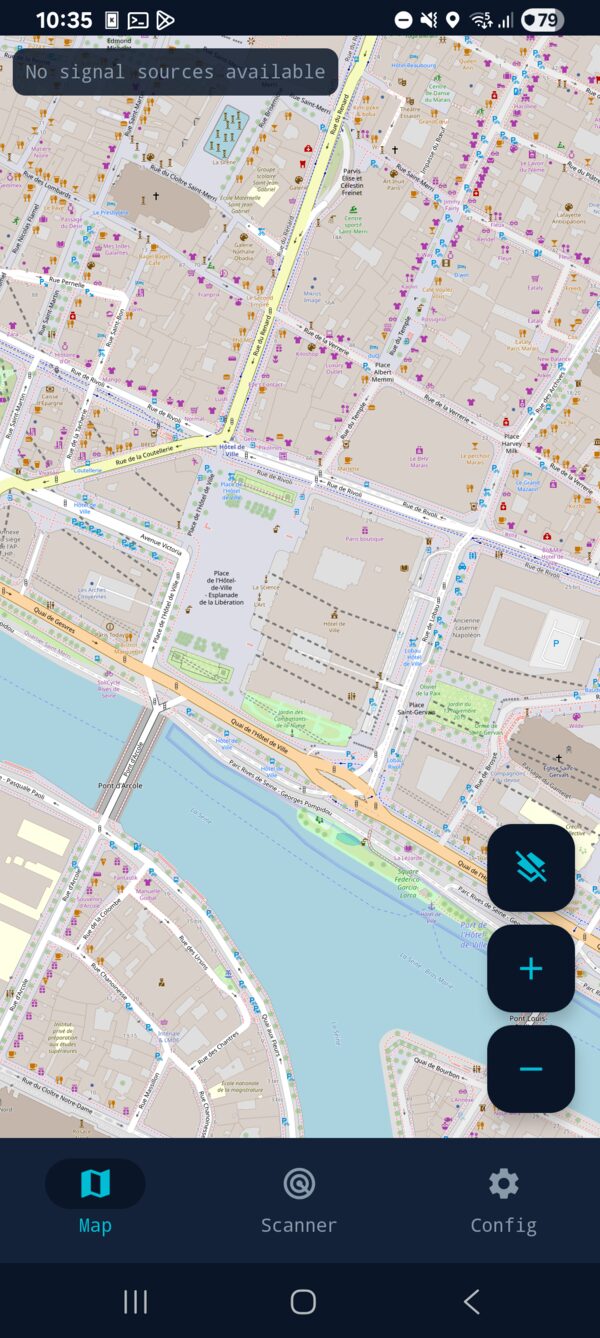
Match observed signals against a reference database of known transmitter positions sourced from 3rd-party and local surveys.
Weighted centroid algorithm fuses all distance estimates into a single position fix, rejecting outliers automatically.
Android APK available for sideloading. Requires Android 8.0 or later.
Get SoOPNavSoOPNav is a research project exploring GPS-denied positioning through signals of opportunity. By fusing measurements from cellular, WiFi, Bluetooth LE, Meshtastic mesh radios, APRS digipeaters, and ADS-B aircraft transponders (via a dedicated SDR tab), the system provides usable position fixes in environments where satellite navigation is unavailable, jammed, or degraded.
Part of DomainsProject.org — an initiative dedicated to building open datasets and tools for understanding the internet.